Header start
- Home
- Keio Times Index
- Keio Times
Content start
Soft Robots Feel Their Way To a Better Future
Kouhei Ohnishi
Professor, Department of System Design Engineering, Faculty of Science and Technology
Sept. 30, 2016

Ohnishi’s Real Haptics Lead to Breakthroughs in Soft Robotics
Prof. Ohnishi’s laboratory is a world leader in the area of high-precision motion control-enabling haptic communication and a forerunner in haptics IP, patenting some of the basic principles of haptics communication, remote control, and simulation. The lab also serves a crucial role at Keio University’s Haptics Research Center, providing much-needed breakthroughs for Japan’s impending super-aged society.
At the Haptics Research Center, researchers collaborate outside of the university in an integrative approach to R&D that aims to create new applications and solutions that use real haptics technologies. Haptics, put simply, refers to recreating the sense of touch by applying forces, vibrations, or motions to the user, according to a commonly accepted definition issued by the International Society for Haptics (ISFH). In contrast, real haptics recreates a sense of firmness, elasticity, and motion obtained by pushing, grasping, or rubbing by conveying this information bidirectionally. This tactile sense is instinctive and is what gives humans superior judgment and flexibility. It is what allows us to play catch or smoothly transport potato chips from our hands to our mouths without crushing them. It is also what allows us to comprehend the feeling of Velcro and to differentiate between the elastic properties of cotton, balloons, and sponges or the feeling of a bumpy gravel road on the bottoms of our feet and a shoe’s rubber sole against a slip-resistant floor. We feel that things are in contact with one another and are able to perceive the sudden impact of a yank or pull. This sensory feedback allows us to react and adapt to our situation almost instantaneously.
For machines, it is difficult to reproduce latent “soft motion,” which humans express even in a relaxed state. Even the most advanced robots are still only capable of stiff motions and lack the motion and force control needed to catch a ball or hold a potato chip without crushing it. The danger that stems from this lack of control over power has long been a barrier to the deployment of service robots into society at large.
In every interaction, there are two conflicting motions: a stiff motion (position control) and compliant motion (force control). Through haptics technology, Ohnishi realized that it is possible to resolve these contradictory forces by applying both simultaneously. Thanks to the innovative theories and advancements in high-speed information and communications technology (ICT), we are now able to equip conventional robots with real-force/tactile sensations that, when reproduced artificially, give robots the ability of delicate touch. Put simply, it is the dawn of the gentle robot.
Using this soft robotics technology, it is possible to amplify (or reduce), record, and code this reproduction, and over long distances. This has the power to broaden the technology’s application in society.
Haptics Findings Meet Future Challenges
In 2050, Japan will become a super-aged society, with those aged 65 years or older making up 40% of the population. As such, the country will be a forerunner in tackling the problems associated with ageing, and the potential applications for haptics technology are endless. With Japan’s super-aged society already in sight, the basic haptics technologies invented at Keio will be able to solve many of the issues society is sure to face, including but not limited to its application in assisting those with physical impairments. Ohnishi’s laboratory and the Haptics Research Center are committed to the creation of robots that are capable of force control and can flexibly adapt their behavior when interacting with humans. The lab envisions a future where a variety of interactions exist: person-to-person, person-to-robot, and robot-to-real world.
In concrete terms, this technology will be manifested as bipedal robots, haptic forceps for robotic surgery, and robots that remotely relay information on rehabilitative motions between doctor and patient. Also included is Prof. Ohnishi’s original parallel link robot, which forms the basis for future humanoid robots and can walk without expending much energy and reduce the amount of shock upon impact. In the near future, these robots will be able to reproduce traditional techniques and skilled crafts. They will be able to record movements according to age and will help to restore declining motor skills. We will also probably see the rise of so-called friendly robots, which will integrate AI and image processing with soft robotics technologies. Robots are also expected to become more and more useful in disaster recovery, health care, and civil engineering. They will perform the delicate and minute tasks involved in surgery and nursing care and, in times of disaster or emergency, explore areas that are dangerous to humans.
When these human-friendly robots spread, we will integrate instinctive human judgment and flexibility with machine power and reliability. More integrated actions between man and machine will occur dynamically over networks, thus ushering in the Internet of Actions (IoA).
The next issue we must tackle then is the coexistence of man and machines. How can these new machines and humans—the artificial and the anthropomorphic—live together in harmony? New technology requires new ways of thinking in order to spread.
Inventing with the Power of 300 Minds
A picture may be worth a thousand words, but so is a single touch. Haptic master-slave robot systems let you, from a remote location, feel the wind, or experience hands on the texture of a sponge. The effect will surprise you. With no sensors of any kind except position detectors, these systems may seem like mundane devices at first glance, but there is something almost magical about the way you feel an invisible force.
This is the power of the master-slave system. When the operator applies force to the linear motor on the master side, a rotary motor on the slave side responds with counteracting force. Just by measuring the displacement of the axis of motion down to several tenths of a microsecond (less than one-ten-thousandth of a second), calculation functions and communication techniques can be used to synchronize the placement and tactile sensations of the master and slave robot.
This is how the master detects precise information feedback when the slave interacts with something in its environment: the texture of a sponge or a gust of wind, for example. This bi-directional tactile communication means that both master and slave can transmit as well as receive signals from each other.
“The principle of haptics, in the simplest terms, is the addition and subtraction of opposing numerical values for touch, especially force, or what is known in mathematics as a Hadamard matrix. This may actually be the first attempt at having a robot use the Hadamard transform. Addition causes the machine to go soft very quickly. It was this realization and resulting formula that opened up all kinds of applications,” Prof. Ohnishi explains.
“The first emergence of this principle was actually 34 years ago. If you look back that far you realize that the successful techniques we’ve developed sit atop a mountain of work that’s been done by the 300 people who have already graduated from this lab. If even one of those people hadn’t been here, we wouldn’t have been able to make these discoveries. I think that it is our responsibility to figure out how these new technologies can be used to effect change for a better society 30 or 40 years down the line. I also think that it is part of our mission as a university to offer solutions on how to further these new technologies.”
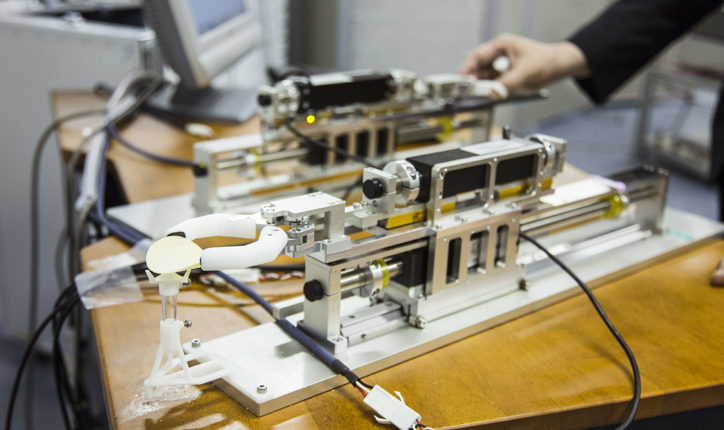
By moving the master (at back of photo), which grasps only air, the slave (foreground) copies the action and grabs a potato chip. The sensation of pinching the potato chip is transmitted from the slave to your hand through the master, even though it remains empty. The ability to transmit subtle sensations like these is what haptics technology is all about.
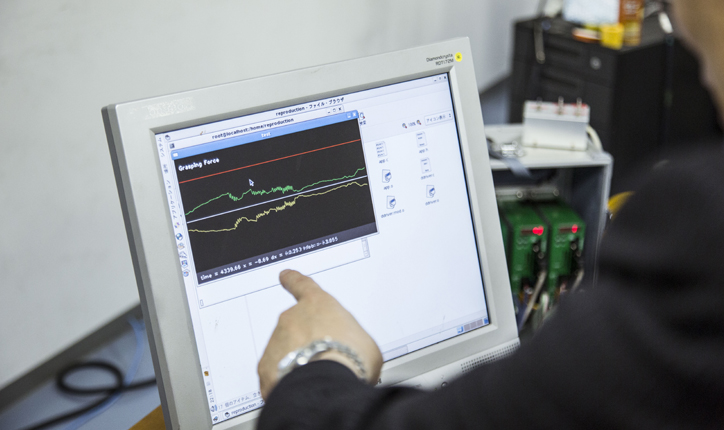
Professor Ohnishi has patented the ability to measure force using only the information of slight changes in position on the slave side of this type of system. The above image shows how the two waveforms can be used to prove the difference in force between the master and slave. Location information is measured down to the microsecond (less than one-ten-thousandth of a second). Ohnishi hopes to eventually drive the cost of this kind of device down to around $100 USD (one tenth of its current price).
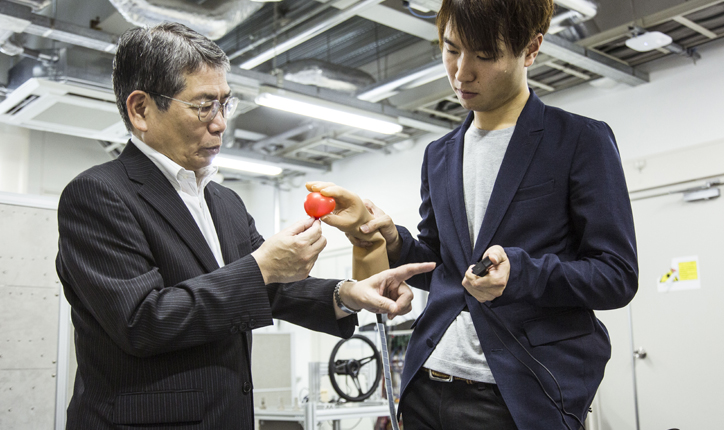

This is a prosthetic hand that can recreate the grip and subtle finger movements of a human hand. In this experiment, haptics technology lets the left thumb (master) control the prosthetic hand (slave) and, with that hand, grab hold of a balloon. Just by forming your fingers into the shape of the object, without tightening your grip, the prosthetic hand can grasp it. This prosthetic hand is currently being researched by first year graduate student Satoshi Fukushima for his senior thesis. In just two and a half months, he has taken his first prototype and decreased the weight of the wearable control device from 1.5 kilograms to just 400 grams, as well as brought material costs down from over $20,000 USD to just a few thousand. Together with Assistant Professor Takahiro Nozaki of the Department of System Design Engineering, Fukushima continues to work day and night to develop these ever more practical devices.

The monitor shows the Ohnishi Lab, located more than a mile away on Keio’s Yagami Campus. This is a demonstration in remote control, using Skype to view a slave robot located at the Ohnishi Lab, which is networked to the master robot here. Pressing the operating handle on the master side allows you to confirm the softness, recoil and kickback of the balloon being held by the arm on the slave side. Force exerted through the master is replicated on the slave's balloon, and when it finally pops, you can experience the moment with your hands, eyes, and ears.
Kouhei Ohnishi
In 1980, Prof Kouhei Ohnishi received Ph.D. in Engineering from EEI, Graduate School of Engineering, The University of Tokyo. Upon graduation, he became an instructor at Keio University’s Department of Electrical Engineering in the Faculty of Engineering. Since 1996 has been a professor at the Department of System Design Engineering in the Faculty of Science and Technology.
Prof. Ohnishi’s achievements include an IEEE Fellow (2001), JSME Fellow (2003), EPE-PEMC Council Award (2004), IEEE Dr.-Ing Eugene Mittelman Achievement Award (2004), IEEJ Fellow (2011), President of the Science Council of Japan Award (2012), and Fukuzawa Award (2012).
Served as IEEE Industrial Electronics Society President between 2008 and 2009, and became the 102nd president of the Institute of Electrical Engineers of Japan for 2015 and 2016. Member of the Science Council of Japan since 2014.
His research interests lie in the field of electrical and electronic engineering, notably power electronics, motion control, robotics and haptics.
*All affiliations and titles are those at the time of publishing.